Profile

- Name: Simon Chen
- Phone: (613) 404 1194
- Email: x454chen@uwaterloo.ca
About Me
Hi! I'm Simon.
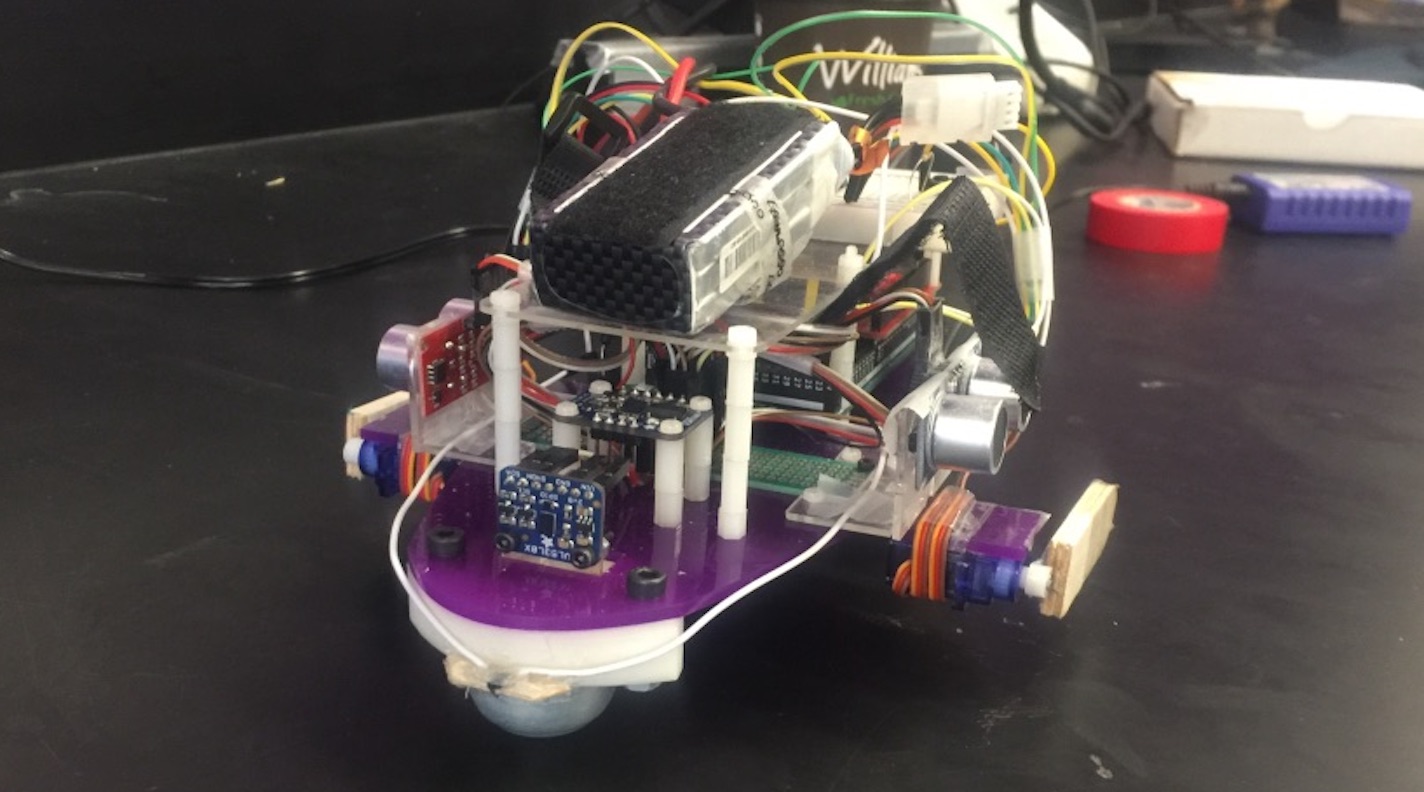
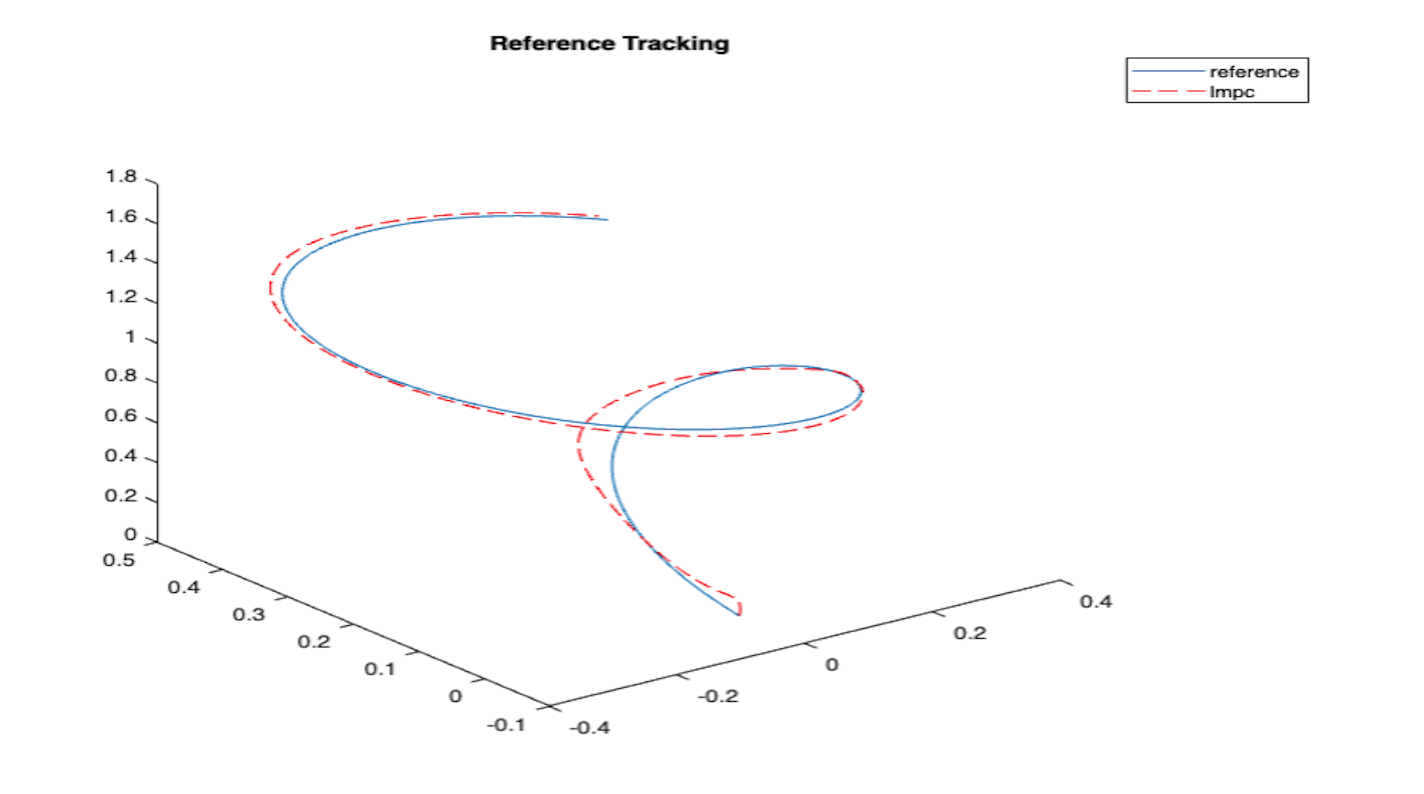
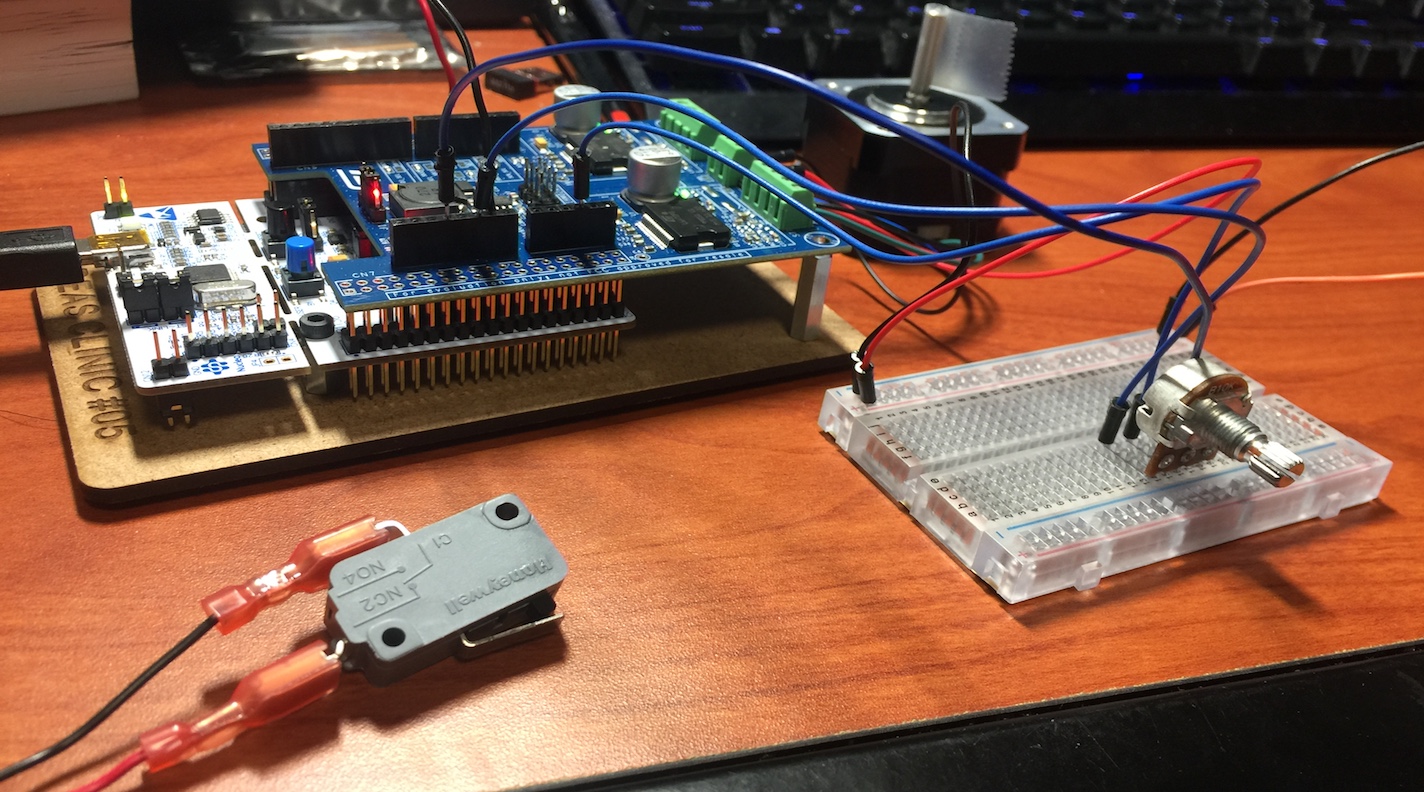
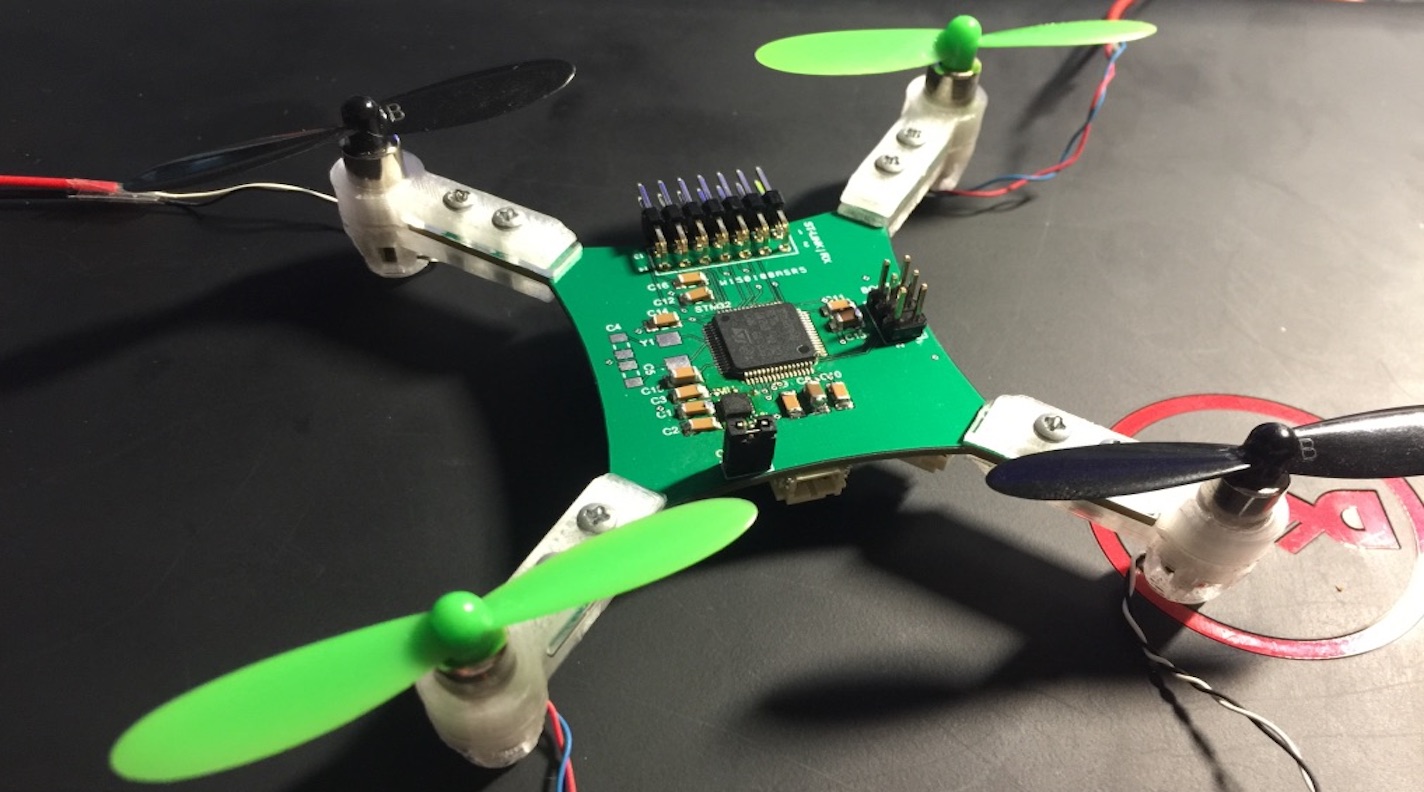
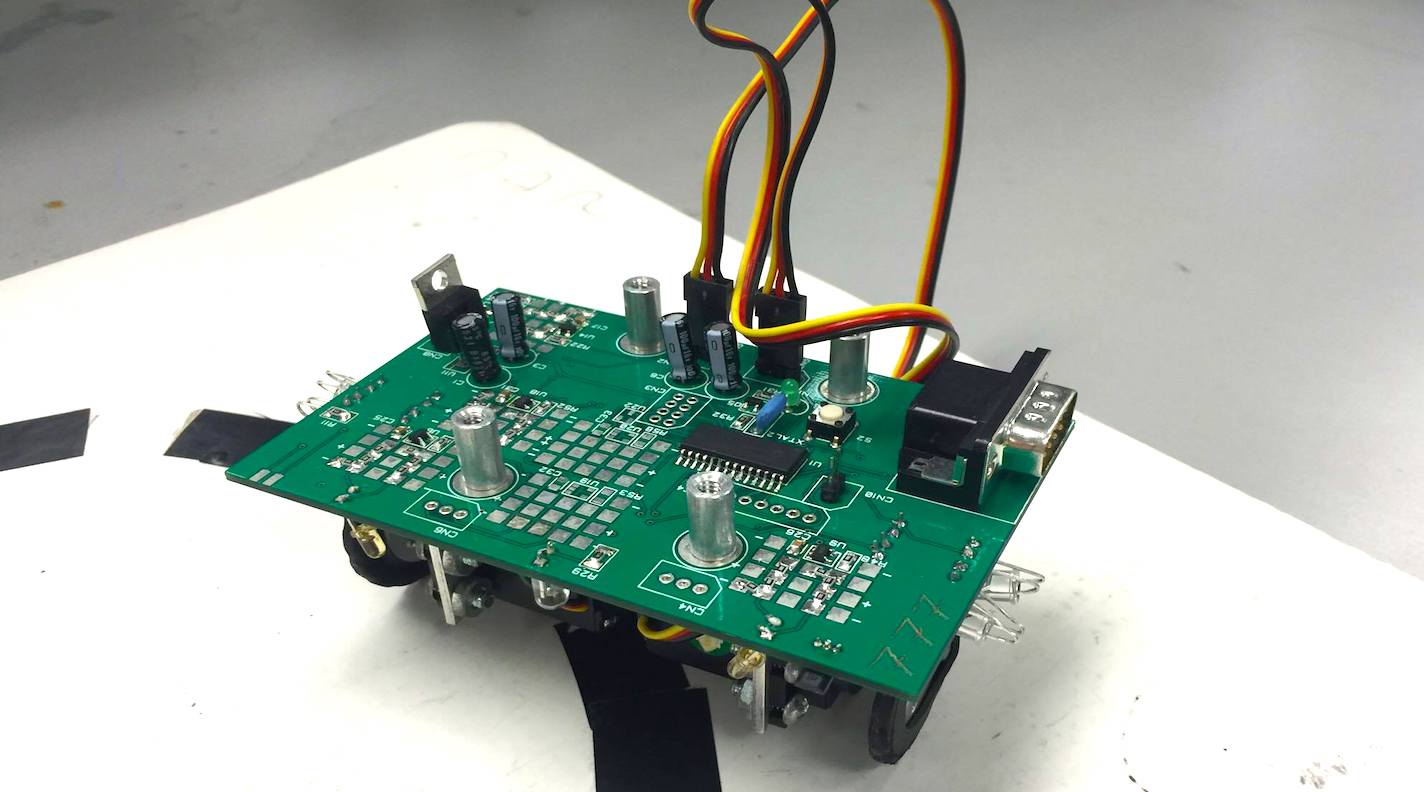
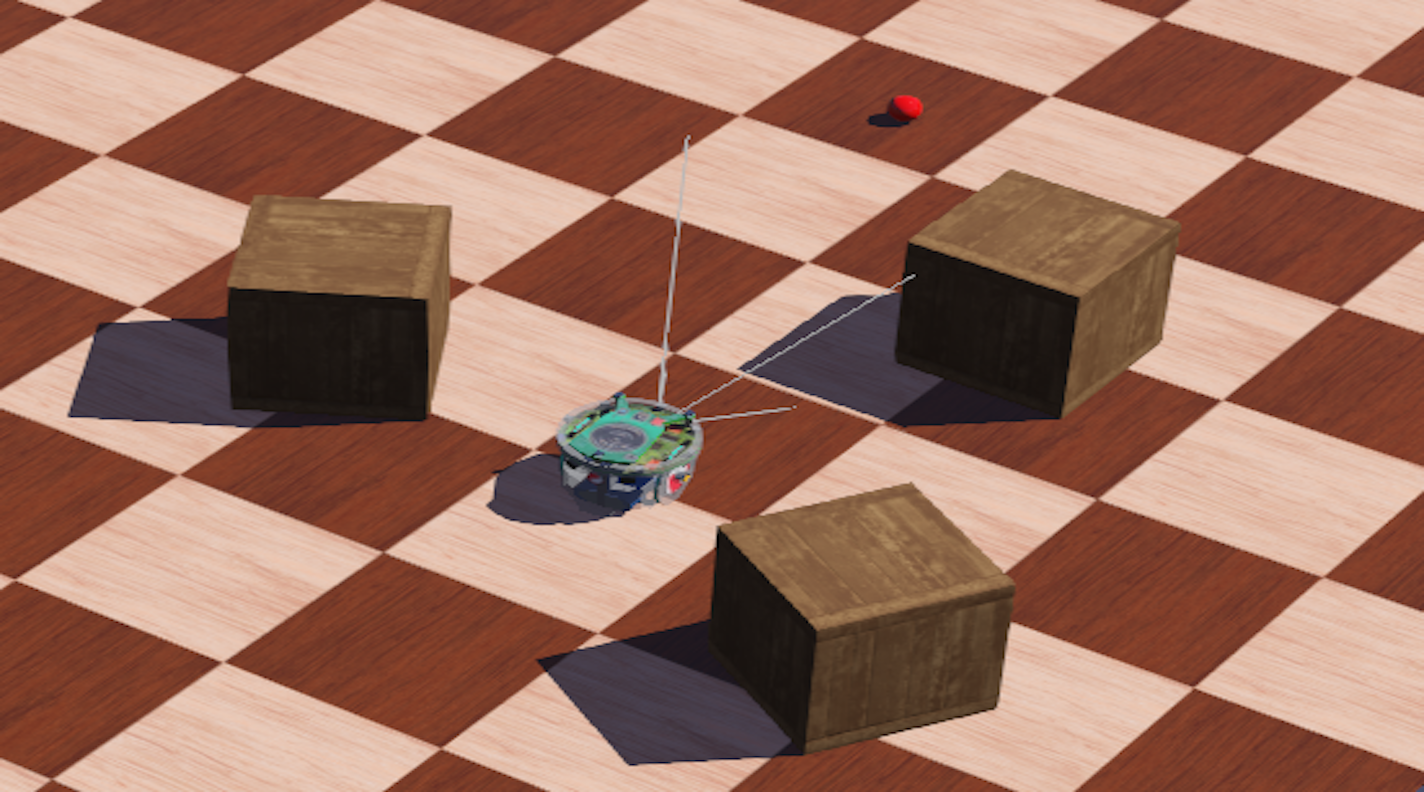
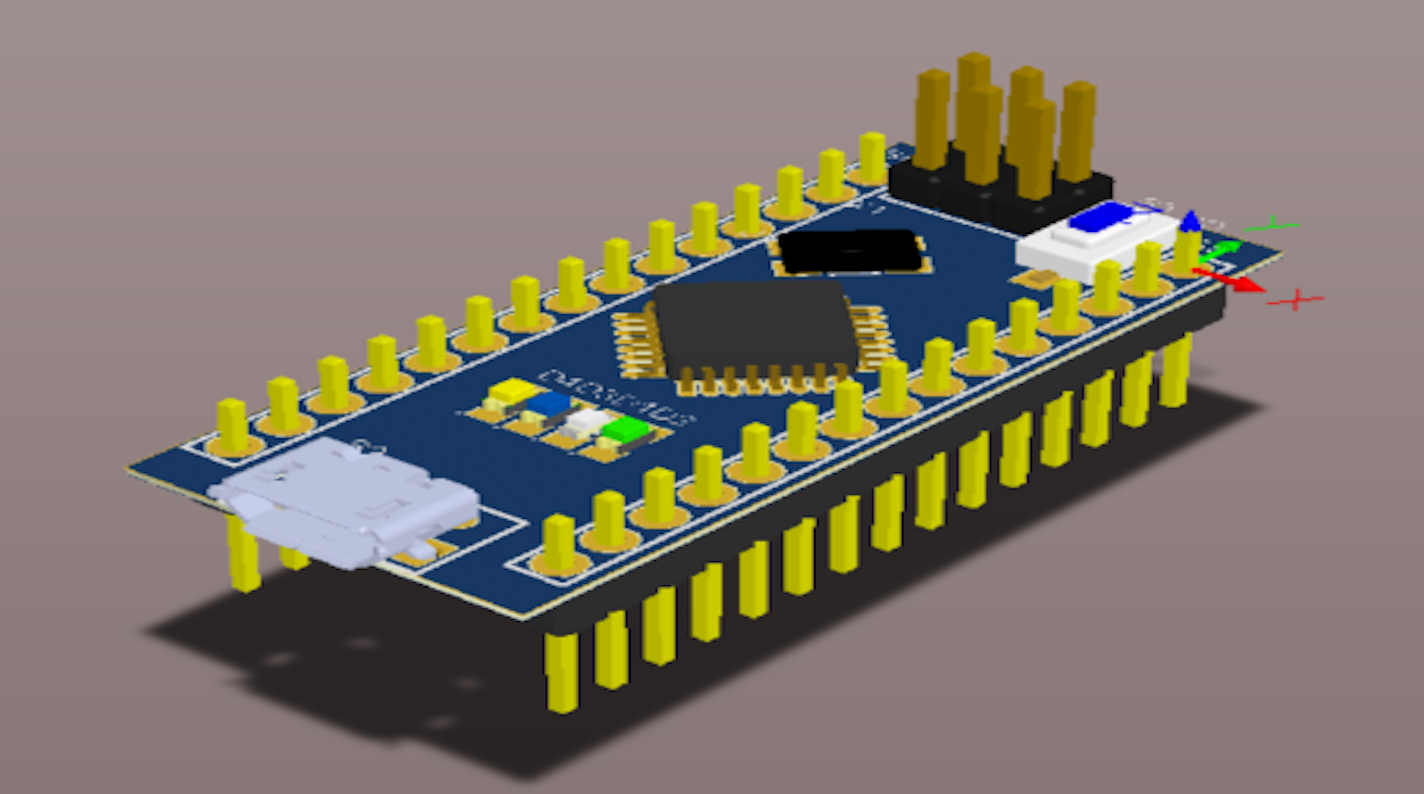
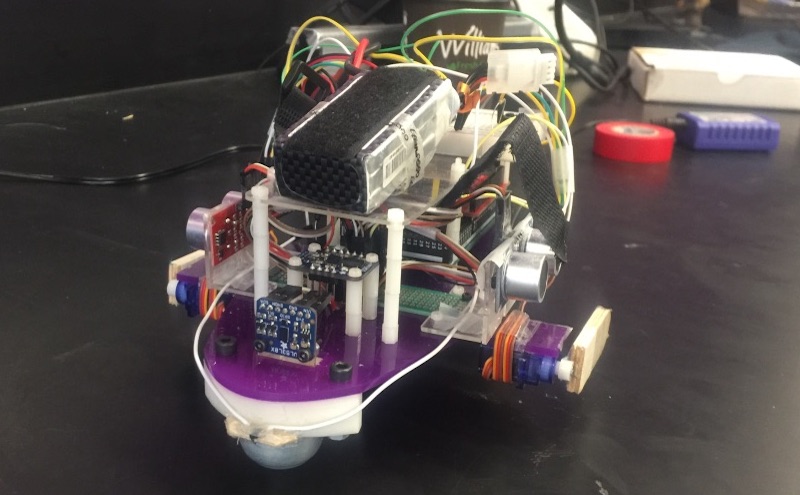
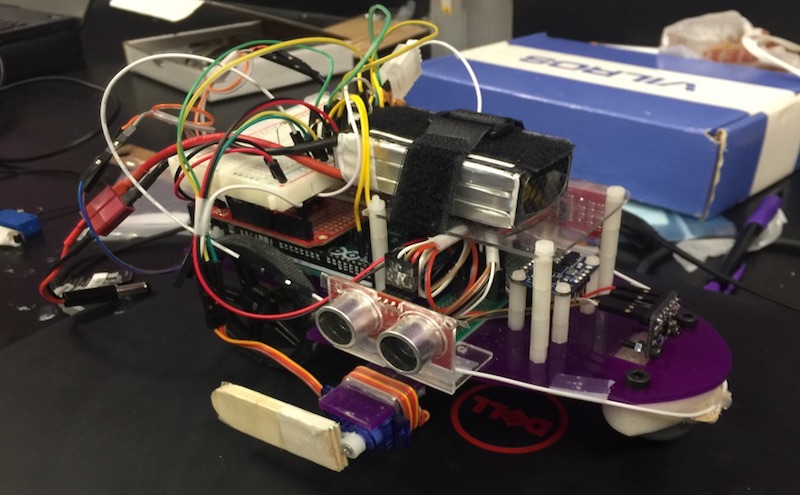
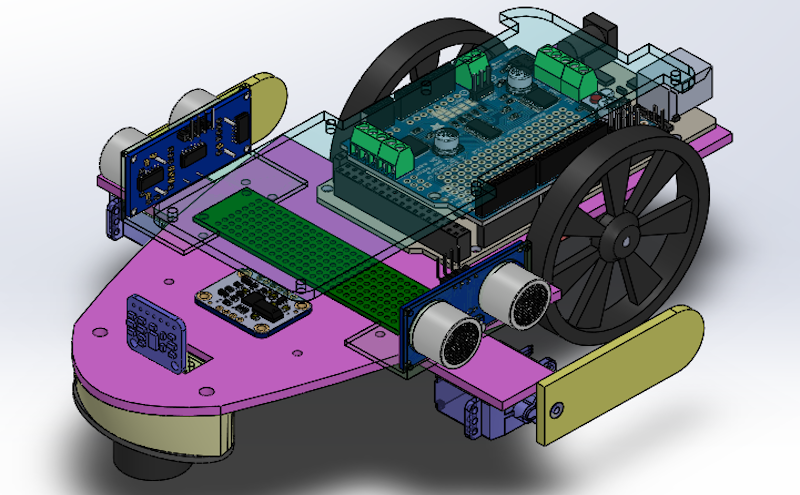
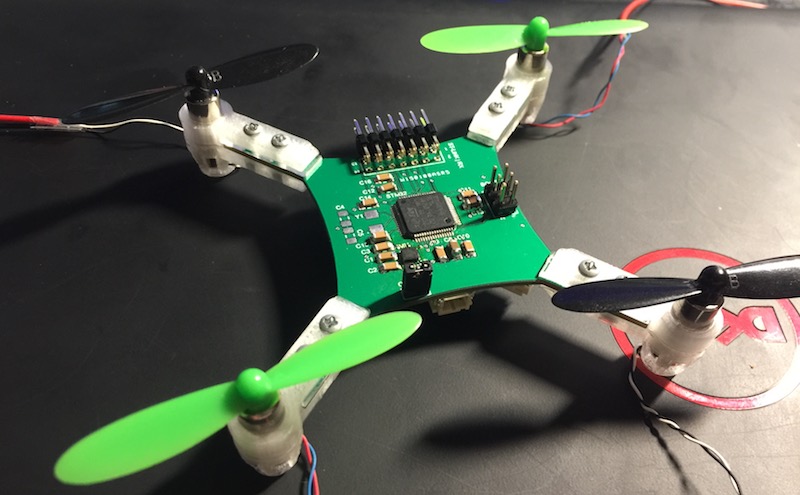
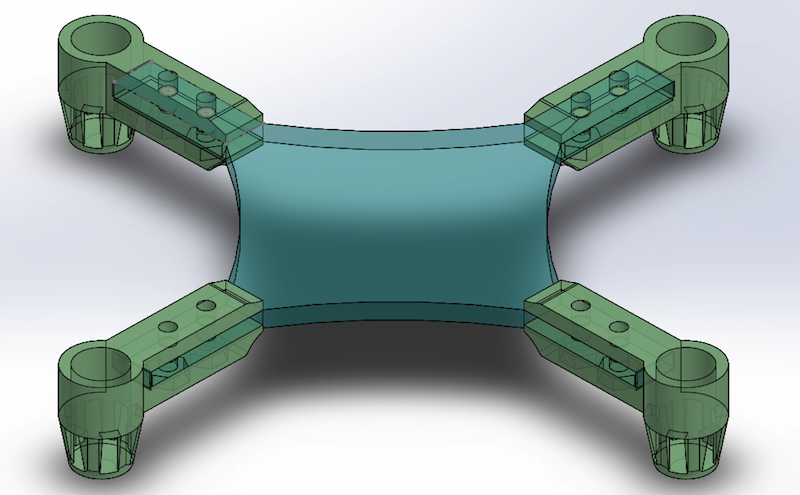
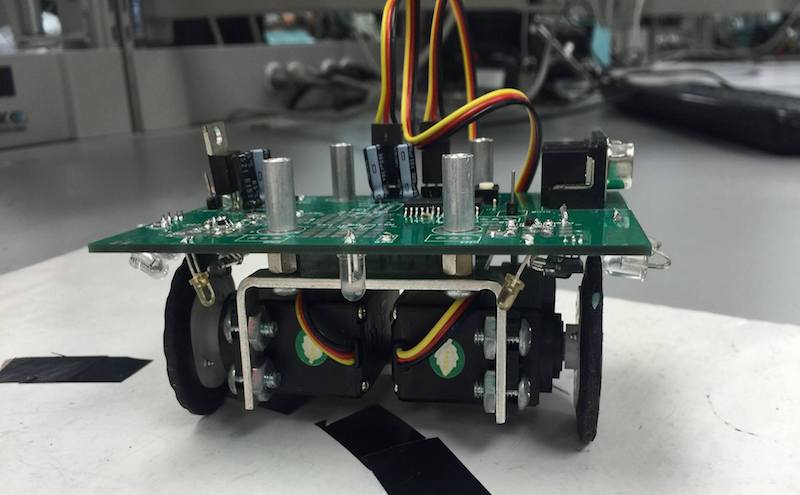
I just finished my MEng degree in Electrical and Computer Engineering with an AI specialization at the University of Waterloo. I love being involved with all areas related to making robots, and I particularly have a strong interest in aspects such as hardware design and robotic controls.
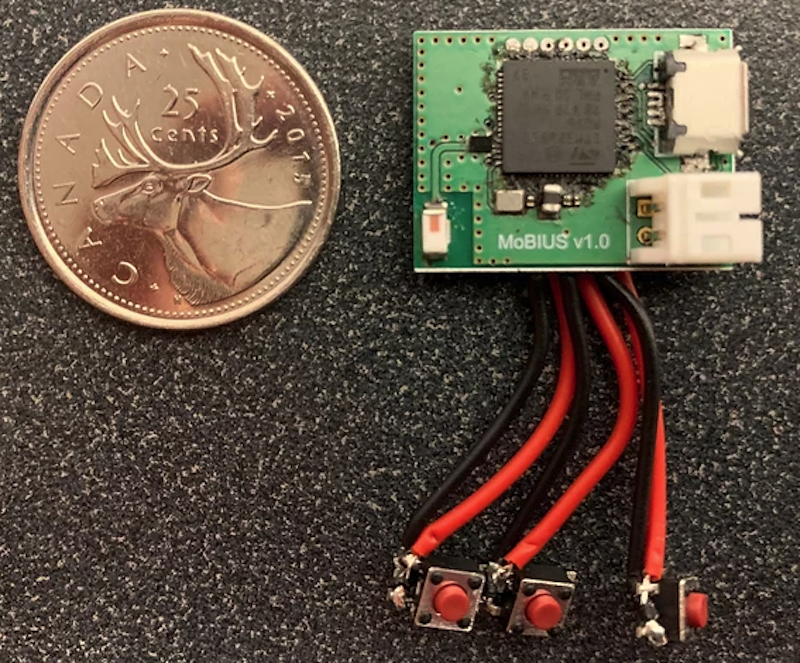
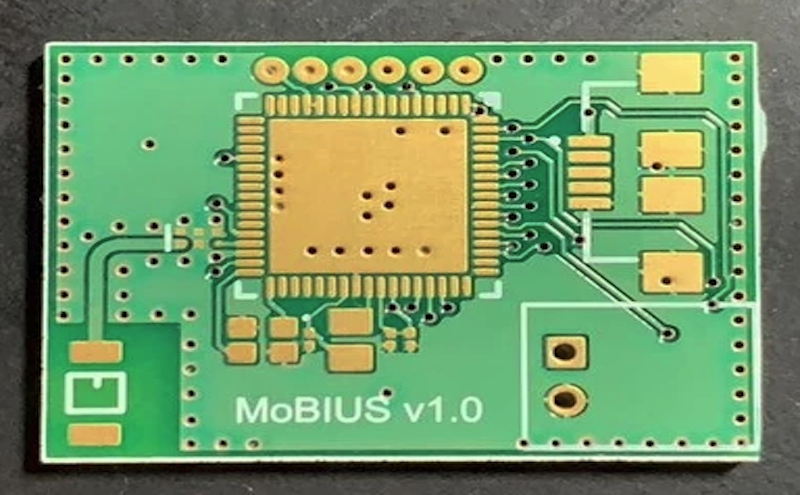
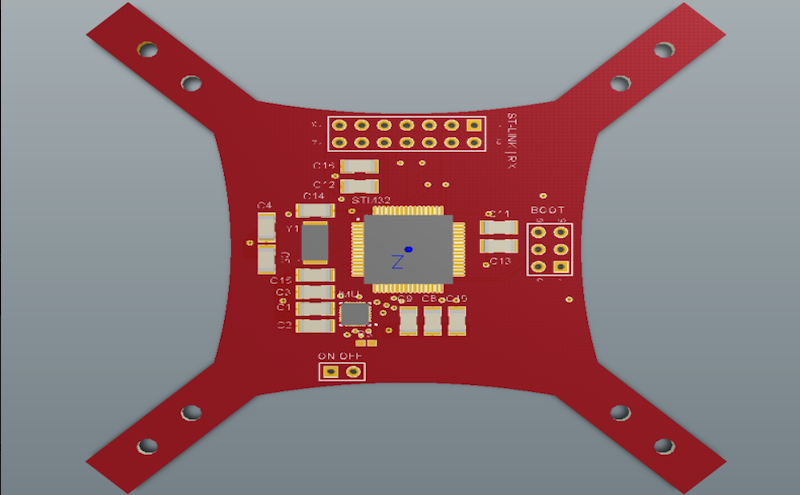
So far I have gained experience in various technical fields including both hardware and software from past projects and interships. Regarding hardware, I am familiar with PCB design and embedded software development. As for software, I have a strong interest in machine learning and computer vision.
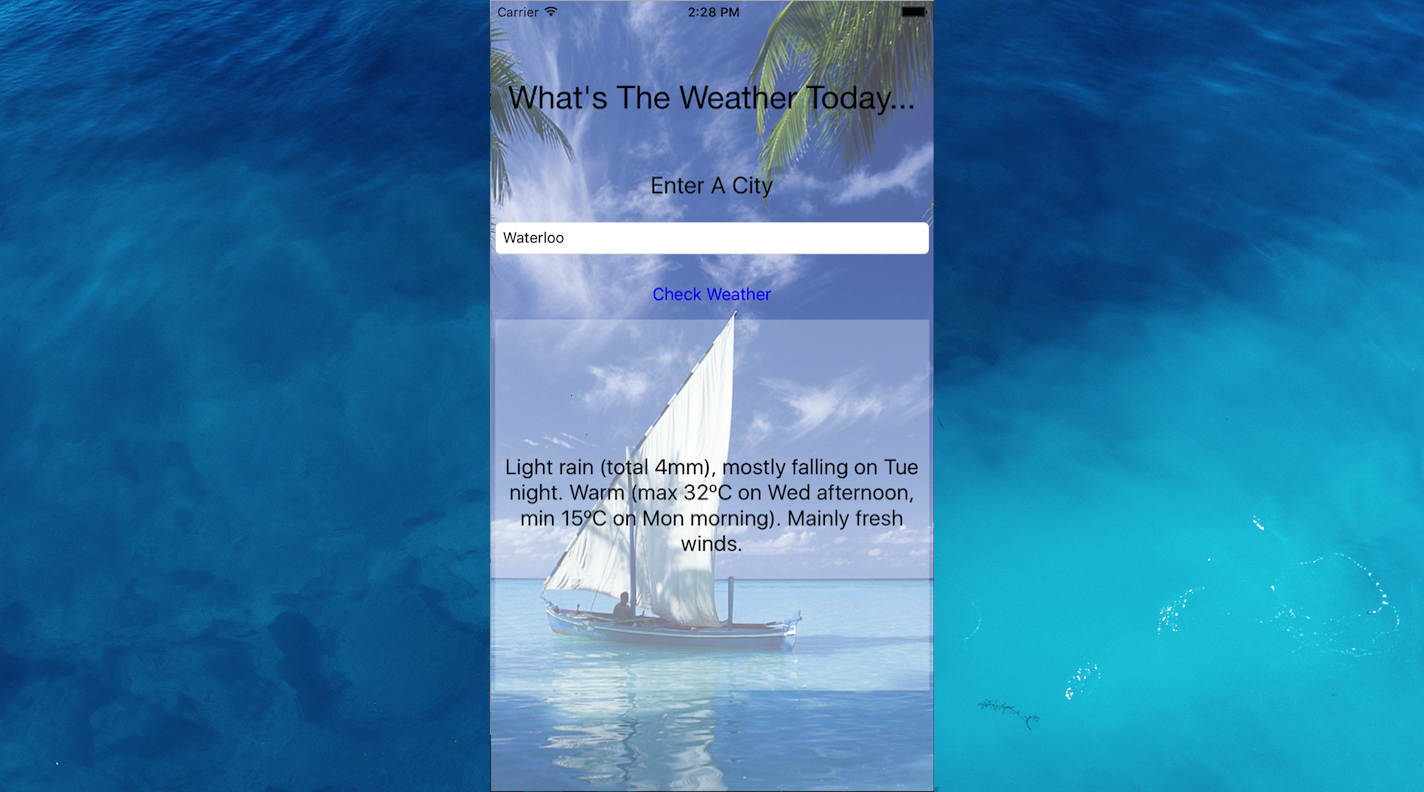
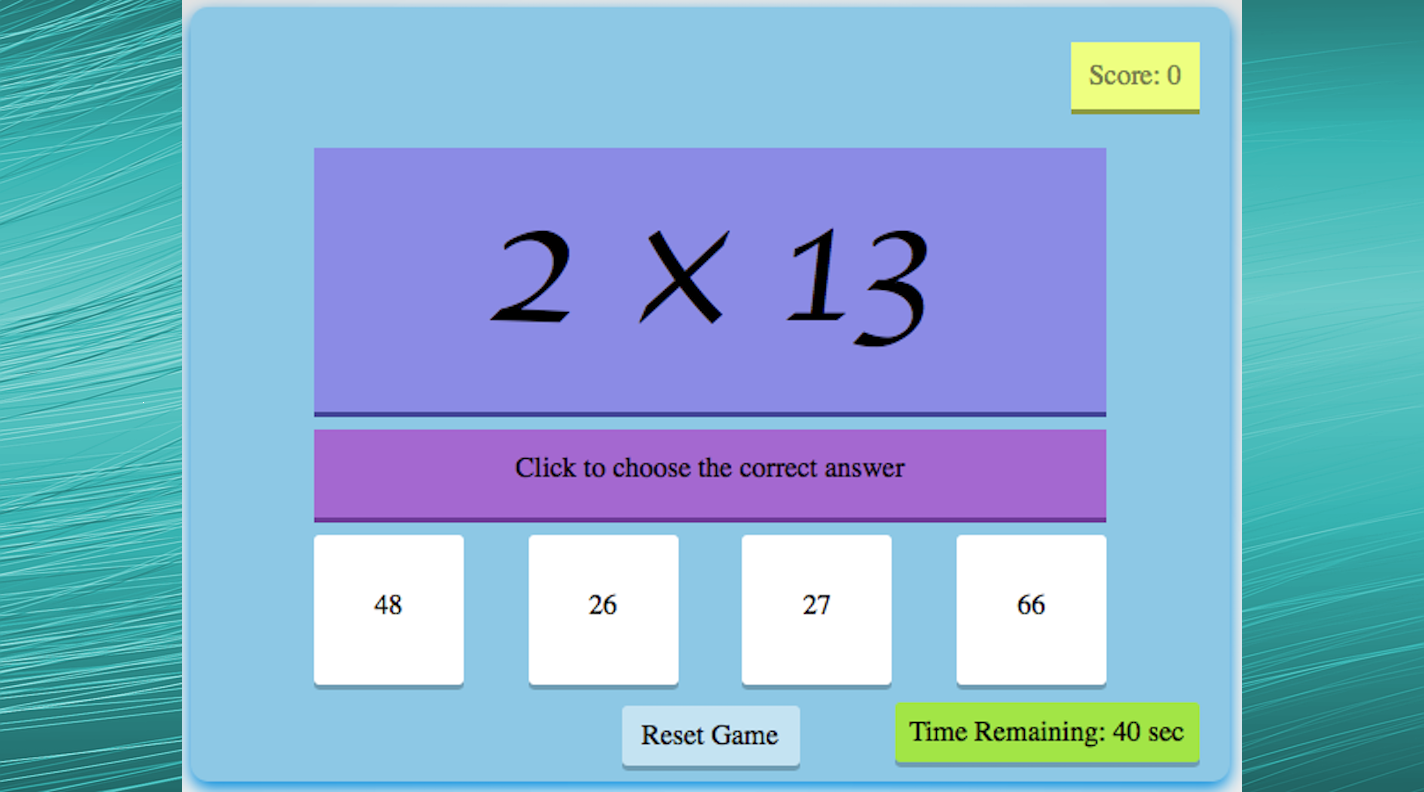
In addition, during my earlier years of undergrad, I have also had the chance to try out web development, game development and iOS App develpment. Below are some of my selected skills; for more details, please see my resume.